東京大学 | 潜水艦用ワイヤレス400W充電器
生産技術 浅田研究室
海中ロボットを使った海底測地手法の開発研究 2006年計画
(海保と東大の共同研究)

・作業準備室を占有していた
観測機器を超小型化(2005年)
>AUV組み込み
・音響海底測地計測を高精度化(2005年)
・AUVを使った自動観測試験を実施(2006年5月)
将来は海底測地専用の小型AUVを使って観測
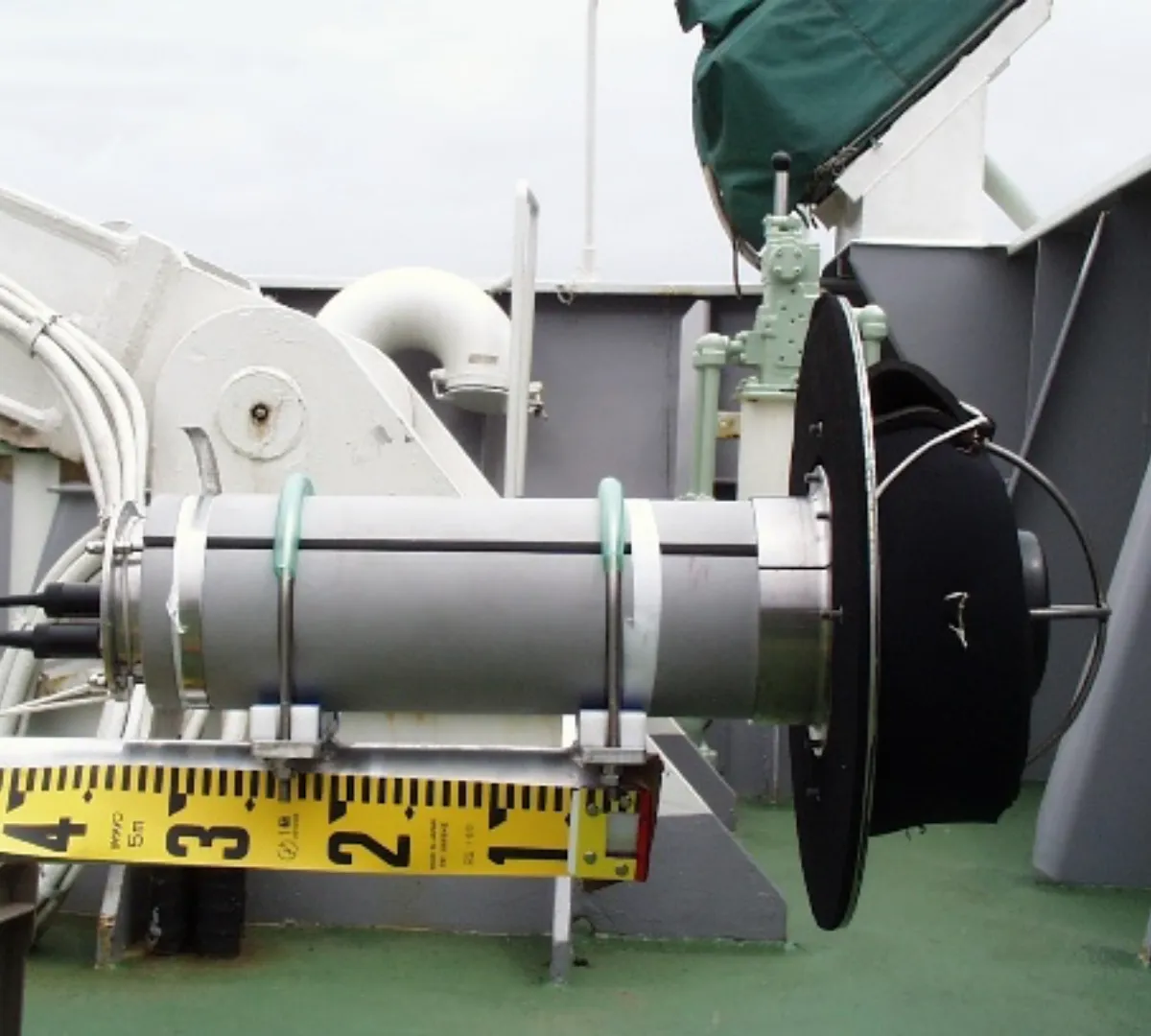
船上システムの海面トランスデューサーポールの最下部に設置されています。
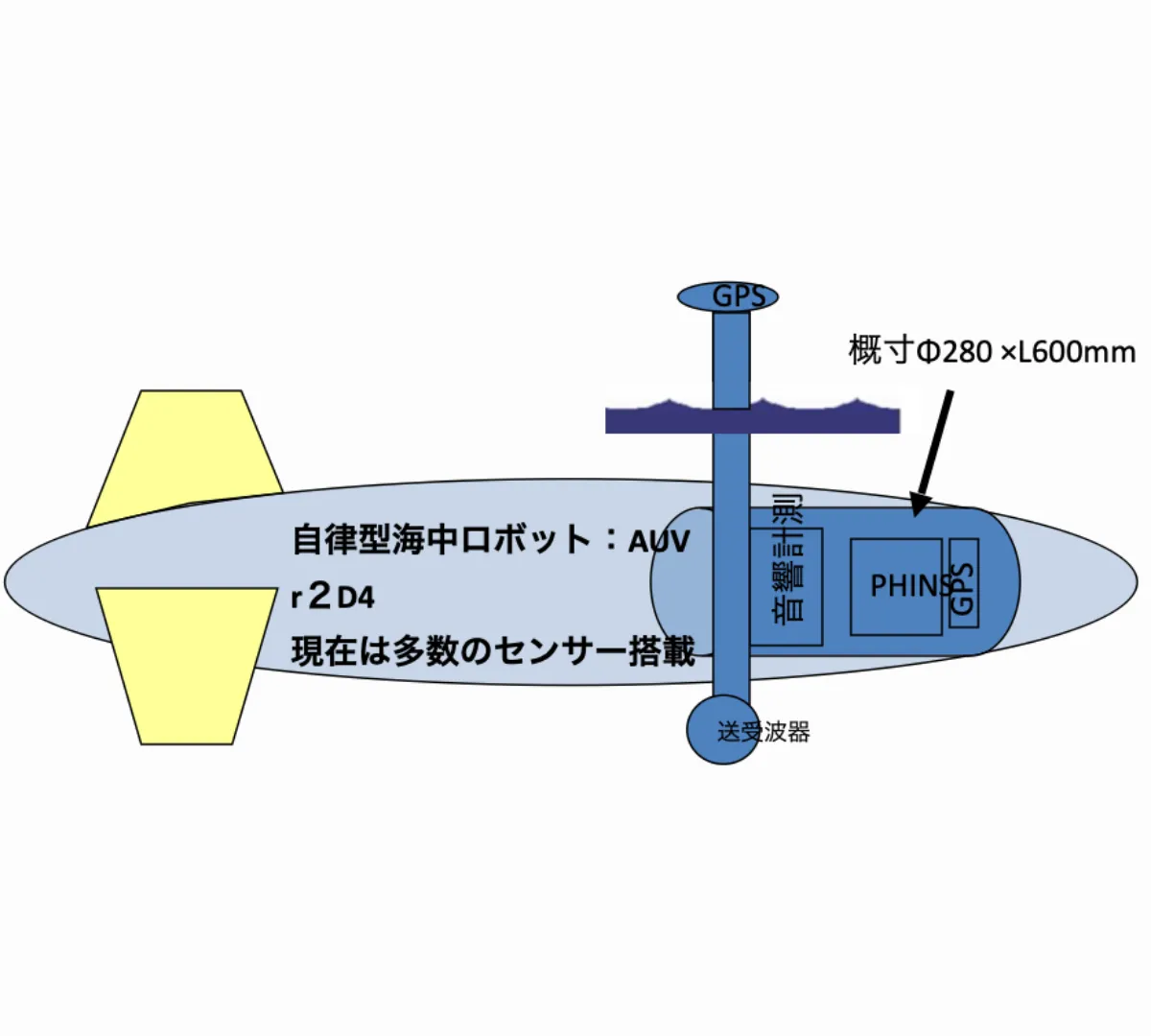
海中ロボット(AUV)を使った新しい海底測地観則の共同研究と将来展望
- 装置の小型化により、各種センサーの配置のアライメント誤差が激減する(外径28cm×長さ60cmの耐圧容器内に観測装置を収納)
- GPSアンテナと音響送受波器固定用が、8mポールから2m程度のポールへと短くなるため曲がり、しなりの誤差が激減する
- 天候の良い時、夜間でもAUVを水中にリリースすれば、勝手に観測を行ってくれる
- 一隻の船で、複数のAUVを使って、効率よく観測が行える
- 水面下50cmをAUVが航走するので、動揺が少なく、高精度の観測結果が期待できる
- 音響観測システムの精度向上を図る
- AUVの充電を非接触の磁気コア充電方式にするのでメンテナンスが簡単、開閉不要
- AUVのデータを船上では無線LANで行うので、開閉不要
- 海底ケーブル・ステーションを使用すれば、毎日の観測も可能となる
海底ケーブルの期限限定のレンタル使用を行う
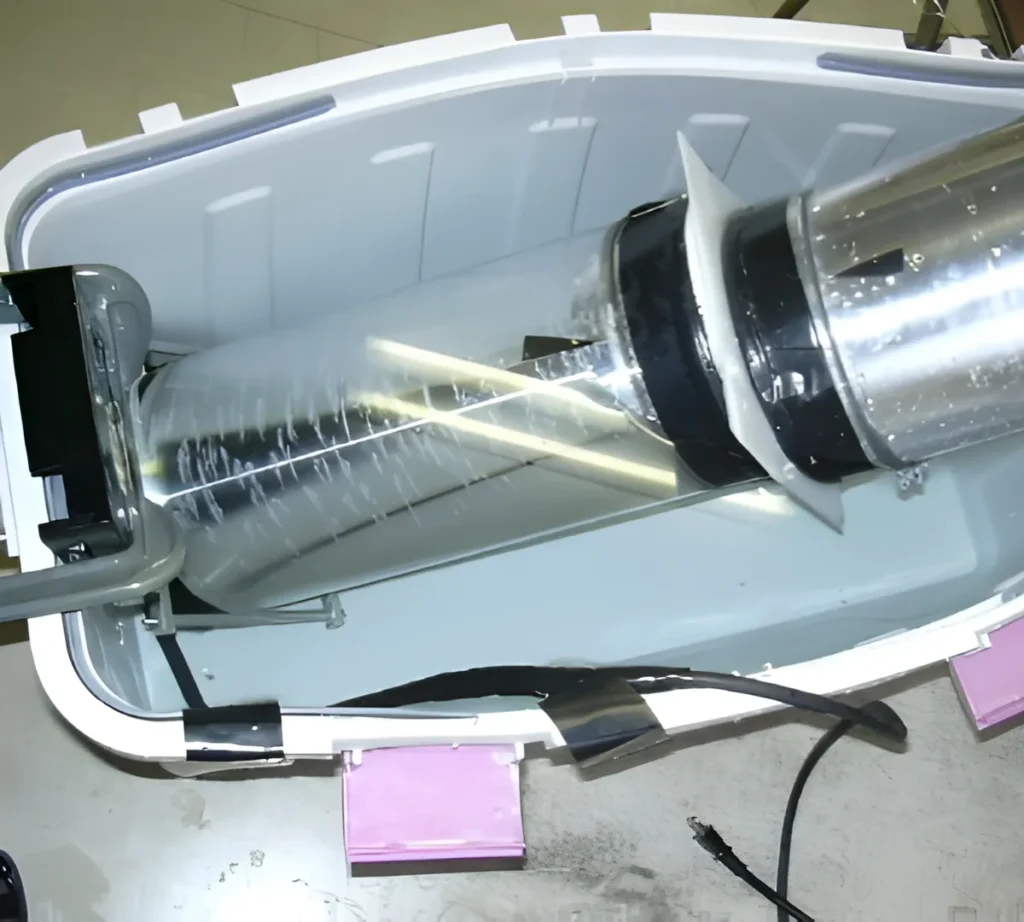
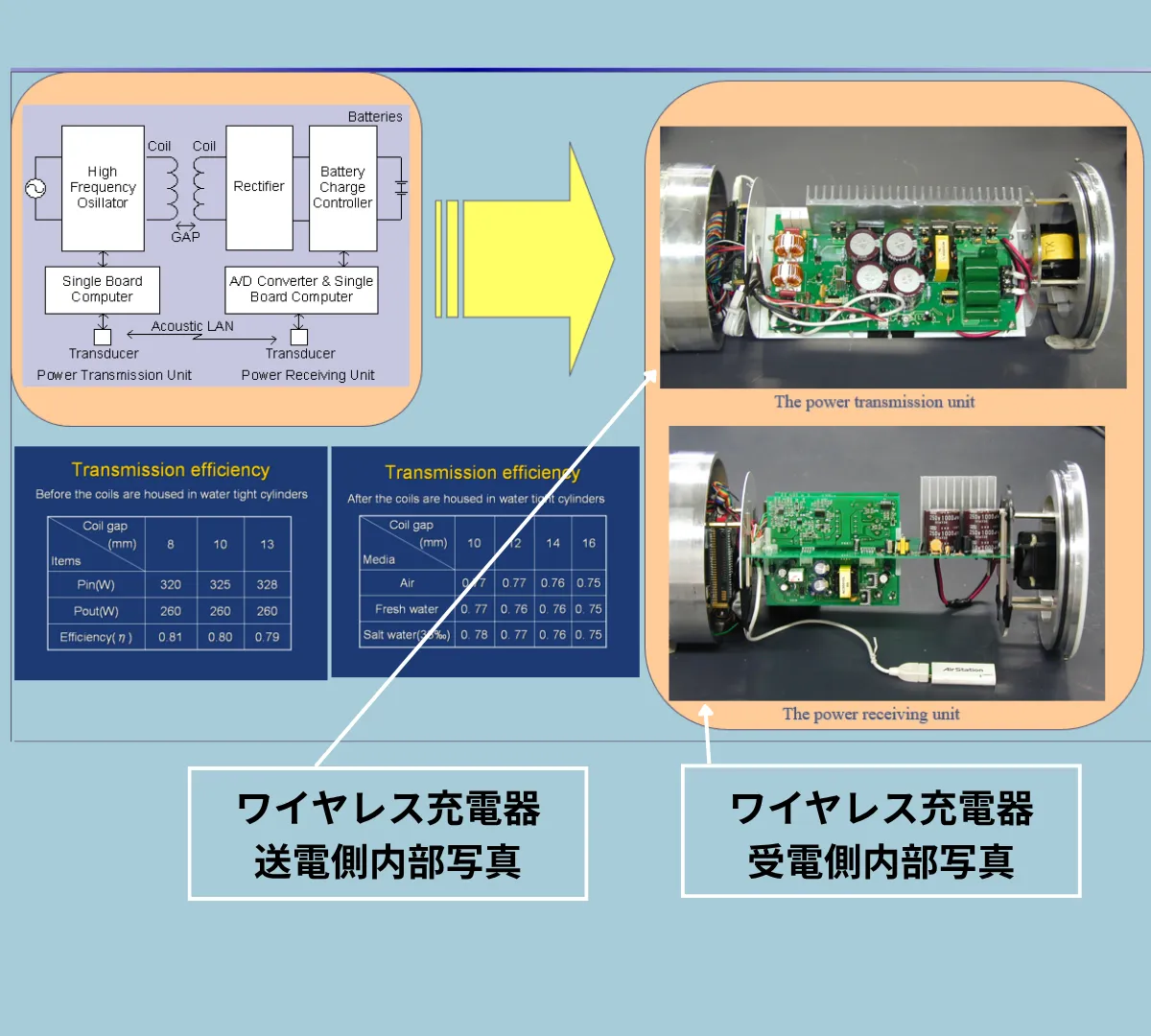
ワイヤレス給電装置を塩水につけての伝送実験
400W充電器
(深海充電コイル間GAP約20mm効率81%)
- 充電
- 32Vx8A、CC 非接触充電器
- ギャップ
- 最大20㎜まで可能
海水中(深海1,000m)での使用を可能にした送受電コイルにフェライトコア使用により、小型化・高効率・電磁誘導影響低減を実現